日産自動車株式会社 総合研究所 モビリティ・サービス研究所
シニアリサーチエンジニア 安藤敏之
人が感じる“心地よさ”を思い描き、フルーガル・エンジニアリングで自動運転の先にある未来を探求
自動運転の実現、真横や斜めに動く「移動体」の開発――。より便利で安全な乗り物に、クルマはその姿を大きく変えようとしている。若き日、「人とは違ったものづくりをしよう」「何かを伝える仕事がしたい」と志したエンジニア、安藤敏之氏が取り組んだのは、そんな未来のモビリティを見据えたプロジェクトだった。試行錯誤の末につくり上げたのが、障害物を回避しつつ単独で、あるいは理想的な”群れ”をなして走るロボットカーだ。見た目、愛嬌も感じさせる彼らは、実はある意外な”もの”を真似することによって誕生する。
ものづくりへの情熱を胸に、あえて“2位”の日産に就職
1963年、埼玉県川口市で生まれた安藤氏は、物心つく前に現在の東京・あきる野市に移り住む。子供の頃、将来の夢は「大工」だったそう。
「家を建てるという仕事は実に面白そうで、飽かず眺めていましたね。ものづくりに興味を持った、あれが最初の体験だったと思います」
理数系が得意だった少年は、高校時代に「人に教える、伝える仕事がしたい」という”想い”に目覚め、数学の教師を志すように。目標を果たすべく、教員養成に強い筑波大学に進学する。
進路に「情報学類」を選んだのは、「とにかく新しもの好きというか、人と違うことがやりたかった」からだった。
「大学に入学した83年当時、コンピュータはようやくPC98が世に出た頃で、”情報”を勉強できる大学も少なかった。だったら、それを突き詰めてやろう、と。結局、教職の道は途中で断念し、コンピュータをつなぐネットワークについての研究に没頭しました」
修士課程に進む道もあったが、「研究を続けるよりも、早くものづくりがしたいという気持ちが勝って」4年で卒業。87年に入社したのは日産自動車だったのだが、そこにもまた”人と違うこと”精神がいかんなく発揮された。
「情報の卒業生が行くのは、たいていコンピュータ会社とか、オンラインシステムを導入し始めていた銀行だとか。私のように”もの系”を志望する人間は少なかったですね。日産という会社を選んだのにも明確な理由があって、『日本で2番目』だったから。だからこそ懸命に上を目指す姿勢が貫かれているだろうと考えたのです。我ながらいい選択だったと思っています」
配属された電子研究所で最初に課せられたのは、エンジン制御システムの開発にかかわるテーマだったという。
「ちょうどエンジンの電子制御のプロジェクトが走り始めた頃だったんですね。ところが当時は、アセンブラという要は”機械語”で開発を進めていた。ぱっと見ても何のことなのかわからない。それを人が見てすぐに理解できる高級言語に置き換えるというのが、与えられた命題でした。それができたら開発をもっと効率的に進めることができるし、バグも減らせるだろうという目論見がありました」
とはいえ前例のないチャレンジだ。何万行とある難解このうえないアセンブラを片端から解読し、不明なところはエンジン設計の担当者に直接聞きにいき……。見事に課題をクリアしたのは、入社2年目のことだった。
「高級言語でエンジンを動かしたのは、恐らく世界初。設計の人間も驚いていましたね。すごくやりがいがあったし、最初にあの仕事ができたのは、今考えればとてもラッキーでした」
開発中、こんなエピソードも。
「置き換えた言語で、あるバグが発生したんですよ。1週間悩んだのに、どこが問題なのかどうしてもわからないのです。ところが、休日にスキーに行こうと乗ったバスの中で、突然『あそこじゃないのか』と閃いた。帰って試してみたら、当たりでした。考えが煮詰まった時にはいったん現場を離れてみろ、とよく言われますよね。でも、まさかあのシチュエーションで自分に”降って”くるとは。とても貴重な体験でした」
続いて着手したのは、AI(人工知能)関連のプロジェクトである。今度はこんな気づきがあった。
「当社はたくさんのエンジンやサスペンション、トランスミッションなどを開発していますが、はたしてそれらをどう組み合わせたら、最もコストパフォーマンスと性能を高められるのか人間が調べるには種類がありすぎるのでAIにやらせようというのがテーマでした。ところが結構苦心惨憺して結果を出しても、それはあくまでも”組み合わせ”であって実体がない。周囲も『ふーん』という感じで、イマイチ楽しくないわけです(笑)。あらためて、自分は形あるものをつくりたいんだな、と再認識させられました」
ぶつからず自走する。未来につながる技術を生体模倣で実現
今ではすっかりポピュラーになった「アラウンドビューモニター」。あたかも車の真上から見ているような画像で、駐車のサポートをするこの装備も、安藤氏が97年から進めた研究の末に誕生したものである。そうやってエンジニアとして着々とキャリアを積む中、2005年からプロジェクトリーダーとして開発に取り組んだのが、「ぶつからずに走るロボットカー」だ。
「当時、社内で電気自動車の開発方針が本決まりになり、設計が始まりました。そこで、それが実用化した先に備えよ、というテーマが研究所に課せられたのです。電気自動車の大きな利点は、排ガスを出さないこと。インホイールモーターといって、それぞれのタイヤにモーターを内蔵させれば、真横や斜めに動くこともできる。そうなると、小型化してどんどん屋内に入ってくるだろう――。つまり、モーターを備えた移動体が道路を出て、より人間の近くにやってくるわけですね。将来、電気自動車が人や障害物を避けて進む技術が不可欠になると考えたのです」
当然、クルマに従来とはまったく異なる制御システムが必要になる。さぞ高度な仕組みを追求したのかと思いきや、着目したのは身近にいる“動物”たちの、ある意味単純な行動だった。「昆虫はあんな小さな脳しかないのに、障害物や天敵を避けて餌場にやってきますよね。その機能がクルマの衝突回避に生かせないものかと東大先端科学技術研究センターと共同で、ハチを徹底的に研究したのです」
わかったのは、彼らが複眼で障害物との距離やその速度などを認識すると、“回転”と“減速”という2つのルールだけで、巧みにそれを避けていることだった。そうしたメカニズムを模倣して作製し、08年のIT・エレクトロニクス総合展「CEATEC」で発表したのが、ロボットカー「BR23C」である。複眼の役割を果たすレーザーレンジファインダー(LRF)を搭載し、センシング即モーターが駆動する。「人が熱いものに触れると、とっさに手を引っ込めるでしょう。あれは反射であって、脳が考えていたら間に合わない。このロボットカーも”何か感知したら逃げる”んですよ。結果的に、CPUパワーが不要な簡単なつくりになりました」
この「BR23C」が単体走行なのに対し、翌09年の同展示会には、やはり障害物を避けつつ、複数が一定の距離を保って走ることのできる「エポロ」を出展した。こちらが模倣したのは、今度は“魚の群れ”である。
「魚たちは、数え切れないほどたくさん集まりながら、お互いぶつからずに結構なスピードで泳ぐ。彼らも、“衝突回避”“並走”“接近”という3つのルールに則って行動しているんですね。それをLRFとUWB通信技術を組み合わせることで実現したのです」
言葉にすればこれだけなのだが、「動物の優れたセンサーを今ある工学的な装置で置き換えるのは、非常に骨が折れました。そこが最も苦労したところですね」と振り返る。
ところで2年続けて発表された2つのロボットカー、まったく別々のプロジェクトで開発したものなのだという。「私は両方のマネジャーをしていましたが、それぞれ担当者は違います。実は動物の機能を真似たというのも偶然の一致で、初めに生体模倣ありきではなかったんですよ。社内からも『ハチと魚の次は何だ?』などと言われるのだけど(笑)。裏を返せば、長い自然淘汰を経て今ここにいる彼らの能力が、いかにすごいのかの証といえるのではないでしょうか」「エポロ」プロジェクトでは、興味深い現象も目の当たりにした。7体つくったロボットカーは、なんと一つとして同じ動きをしなかったのだ。
「もちろんモーターもCPUもセンサーも一緒です。ところが走らせてみると、やたら首を振るのとか、前に詰めたがるのとか。恐らくセンサーの微妙な感度の差などによるものだとは思うのですが、考えてみればそれは動物界にもあること。結局、生き物のルールを入れたからこそロボットに”個性”が生まれたのだ、というのが私の結論なんですよ。でも同じ群走行でも、軍事パレードみたいなのと多少個性的な走りと、どちらが心地いいのか? 結果論ではあるけれど、将来に向けてそんな付加価値も生むことができたと思っています」
きょろきょろと首も振りながら、つかず離れず行くロボットカーたちは、どこかユーモラスでもあり頼もしくも見える。こうした成果をベースに効率的な群走行が実現すれば、安全なうえに渋滞も起きにくくなるだろう。
研究者に必要な資質 それは24時間考え続けること
その後、周囲環境認識技術や自動運転技術などの研究に従事した安藤氏は、「気づけば研究所一筋に30年近く、という稀有な存在」になっていた。
「日産では、限られたリソースを最大限に生かす“フルーガル・エンジニアリング”が徹底されています。そこで大事になるのは、着眼力、洞察力。若い人にもそれを磨いてほしいですね。どうしたら磨けるか、ですか?
研究者たるもの、まずはテーマが与えられたら寝ても覚めてもひたすら考えることだと思うんですよ。さっきの“スキーバスの奇跡”だって、考えていたからこそ起こったわけです」
続けて「成果を導き出したら、それをきちんと伝えることを意識すべき」と話す。
「ロボットカーは、シミュレーションを提示するだけでもよかったのです。しかしあえて実物をつくり、走らせたことで、老若男女みんなから『わぁ面白い』と言ってもらえた。興味津々の子供たちの姿を見たら、なり損ねた教師の夢がちょっとだけ実現できたような気分になりました」
自身の今後の夢は、クルマとネットワークを組み合わせ、まちを「デジタル箱庭」で表現することだという。
「我々も含めて、メーカー各社の当面のターゲットは、自動運転の実現です。まだ越えなければならないハードルがありますが、もう少し視野を広げれば、未来のクルマは”まちのスキャナー”になる可能性があると思うのです。例えば今でも災害時に、走行中の自動車が集めたデータを基にして、どの道路が通行可能かといった情報提供が行われますよね。ICT端末を持つコネクティッドカー+自動運転技術、さらにはネットワーク技術の3つを有機的に結び付けたら、もっと多彩で有意義で面白いまちの魅力を視覚化することができるのではないか。そんなことを考えているんですよ」
His Research Theme
ヒントはハチと魚の危険回避行動にあった!生態模倣に基づくぶつからないロボットカー
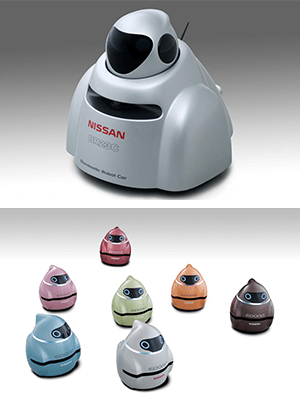
日産自動車が開発したロボットカーは、「BR23C」と「エポロ(EPORO)」の2種類で、ともに生体模倣(バイオミミクリー)の手法を採用している。
BR23Cは、東京大学先端科学技術研究センターの神崎亮平教授との共同研究によるもので、反射的な行動の組み合わせで障害物を避けて移動するハチの機能に倣って作製された。その回避行動のパラメータを数値化するとともに、実験結果をスケール変換および車輪動作モデルに適用し、ロボットカーに実装して虫の動きを実現。レーザーレンジファインダー(LRF)というセンサーが昆虫の複眼の役目を果たし、パーソナルスペースに侵入した障害物を検出し、状況に応じて回転行動や減速を行うことで、それを瞬時に回避する。
単体の前者に対し、エポロは群走行できる。群れで泳ぐ魚の行動をヒントに、同社が独自開発した。一般的に魚は「側線感覚」と「視覚」により周辺環境を認識し、衝突回避、並走(速度を合わせる)、接近(遠すぎたら近づく)という3つの行動ルールに従って魚群を形成する。エポロは、側線感覚を前出LRF、視覚を近距離用の無線通信であるUWB(超広帯域無線)通信技術で代替した。「 ともにコンセプトとして提案したものだが、将来自動運転が一般化した時、これらの技術が活用されている可能性は大いにあると考えている」(安藤氏)

あんどう・としゆき
1963年、埼玉県生まれ。87年、筑波大学第三学群情報学類卒業後、日産自動車株式会社に入社。電子研究所にて電子制御開発支援研究に従事。2005年、電子情報研究所の主任研究員として生体計測センシング研究に従事。07年モビリティ研究所にて周囲環境認識技術、カーロボティックス技術、自動運転技術などの研究に従事し、現在に至る。
設立/1933年12月
代表者/社長兼最高経営責任者(CEO)カルロス・ゴーン
従業員数/連結14万9388名(2015年3月末現在)
所在地/横浜市西区高島1-1-1
コメント